I. Introduction
In radar systems, clutter cancellation is one of the most challenging issues; thus, research in this realm, including clutter suppression filters, moving target indicator algorithms [1–4], and clutter cancellation algorithms using clutter maps [5], is in progress.
Meanwhile, in [2, 3], the researchers employed differences between chirps; thus, clutter was effectively cancelled. In [5], to suppress the effect of clutter, researchers used clutter maps based on range-Doppler (RD) maps. They first generated RD maps, or so-called clutter maps, several times in advance. By subtracting the generated clutter maps from the received signals, clutter is removed and the target parameters are estimated. However, in cases in which the radar cross section (RCS) of the target is significantly lower than that of the clutter, a problem may occur; the clutter-removal process may remove targets as well as clutter.
In this paper, to overcome this problem, the proposed algorithm creates an RD map after applying the clutter suppression filter instead of a general RD map. After the clutter suppression filter is applied, the RD map significantly reduces the clutter removal effect on targets, where RCS is relatively weak by suppression of the effect of relatively dominant clutter signals. To confirm the effectiveness of the proposed algorithm, experiments using 24-GHz radar systems were performed. The experimental results showed that the proposed algorithm could detect weak targets that remained undetected by the existing map-based clutter-removal algorithm.
II. System Model
This section considers the system model of a frequency-modulated continuous wave (FMCW) radar system. In this model, L chirp signals were sequentially transmitted for N frames and received by K RX antennae. The beat signal was obtained by mixing the TX signal with the RX signal. At the k-th RX antenna, the l-th analog-to-digital convert (ADC) beat signal is denoted by
y l ( k ) [ n ]
where Π[n] is unit amplitude pulse and
y l ( k , i ) [ n ]
(2)
where
a m ( i ) f D , m ( i ) f b , m ( i ) f b , m ( i ) = μ τ m ( i ) τ m ( i ) θ m ( i ) w l ( k , i ) [ n ]
III. Conventional and Proposed Clutter Cancellation Algorithms based on RD Map
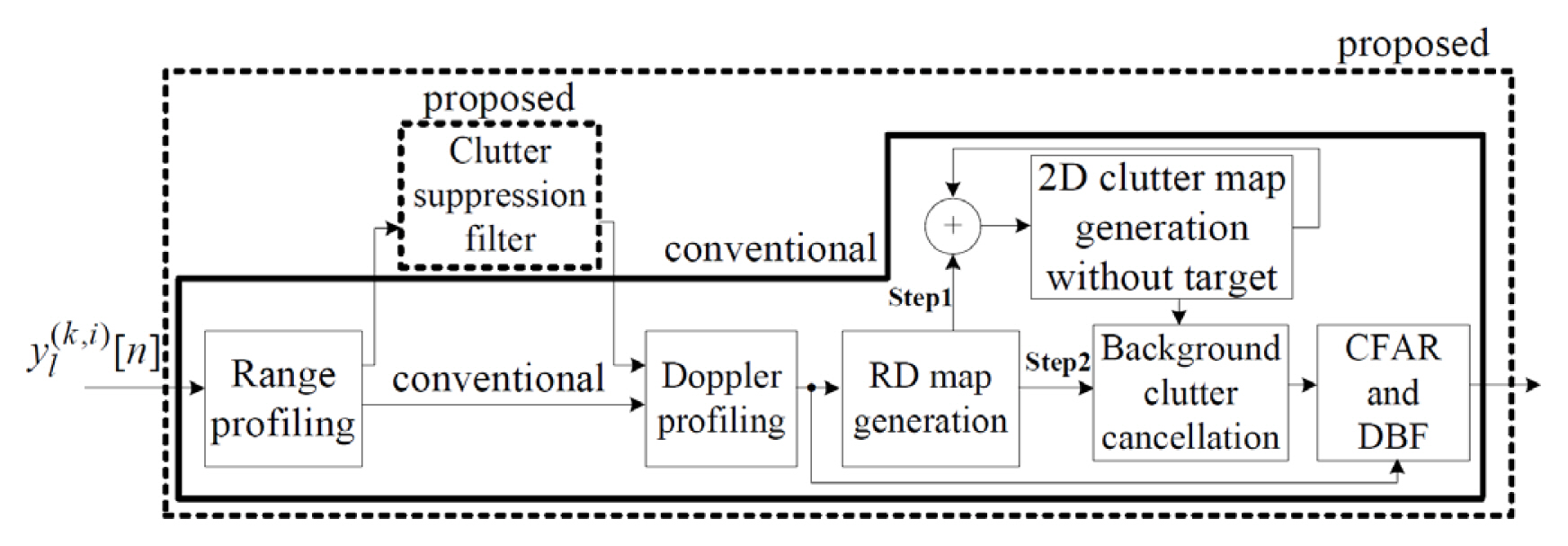
This section addresses conventional and proposed clutter cancellation algorithms based on the RD map. Fig. 1 shows the structures of conventional and proposed algorithms, where the part boxed with solid lines is the conventional algorithm, and that boxed with dotted lines is the proposed algorithm. Both algorithms usually consist of a clutter-map-generation step and a detection step after clutter removal. In the first step, to generate the RD clutter map in the case of no target, 2D fast Fourier transform (FFT) was performed on
y l ( k , i ) [ n ]
However, when the RCS of the target is significantly lower than that of the clutter, both the target and clutter components might be removed during the clutter-removal process. Therefore, in the proposed algorithm (Fig. 1), a clutter suppression filter was added between range profiling and Doppler profiling. This process had the effect of relatively increasing the RCS of the target, which was significantly lower than that of the clutter.
IV. Experimental Results
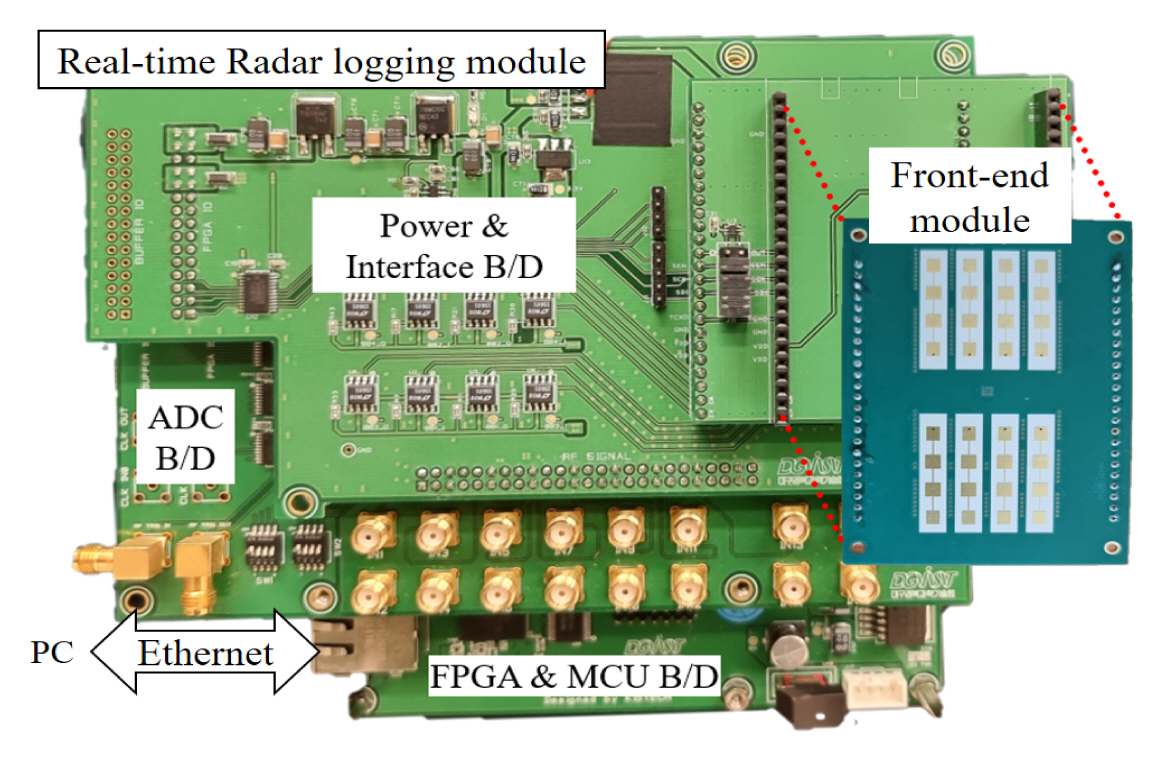
In this section, the performance improvement of the proposed algorithm was verified through experiments using 24-GHz FMCW radar systems with 1 TX and RX antennae. Fig. 2 shows the configuration of the experiments, consisting of a 24-GHz FMCW radar front-end module with antennae and transceiver, a real-time signal logging module, and an algorithm based on MATLAB of PC. Two modules have been developed by the Radio Research Center for Advanced Intelligent Radar Sensor Technology (RRCAiRST) in Korea. The parameters for the experiments were as follows: bandwidth B = 250 MHz, chirp duration T = 100 μs, pulse repetition interval TPRI = 1 μs, number of frames N = 1,000, TX power PTX = 10 μW, and field-of-view of antenna = 90°.
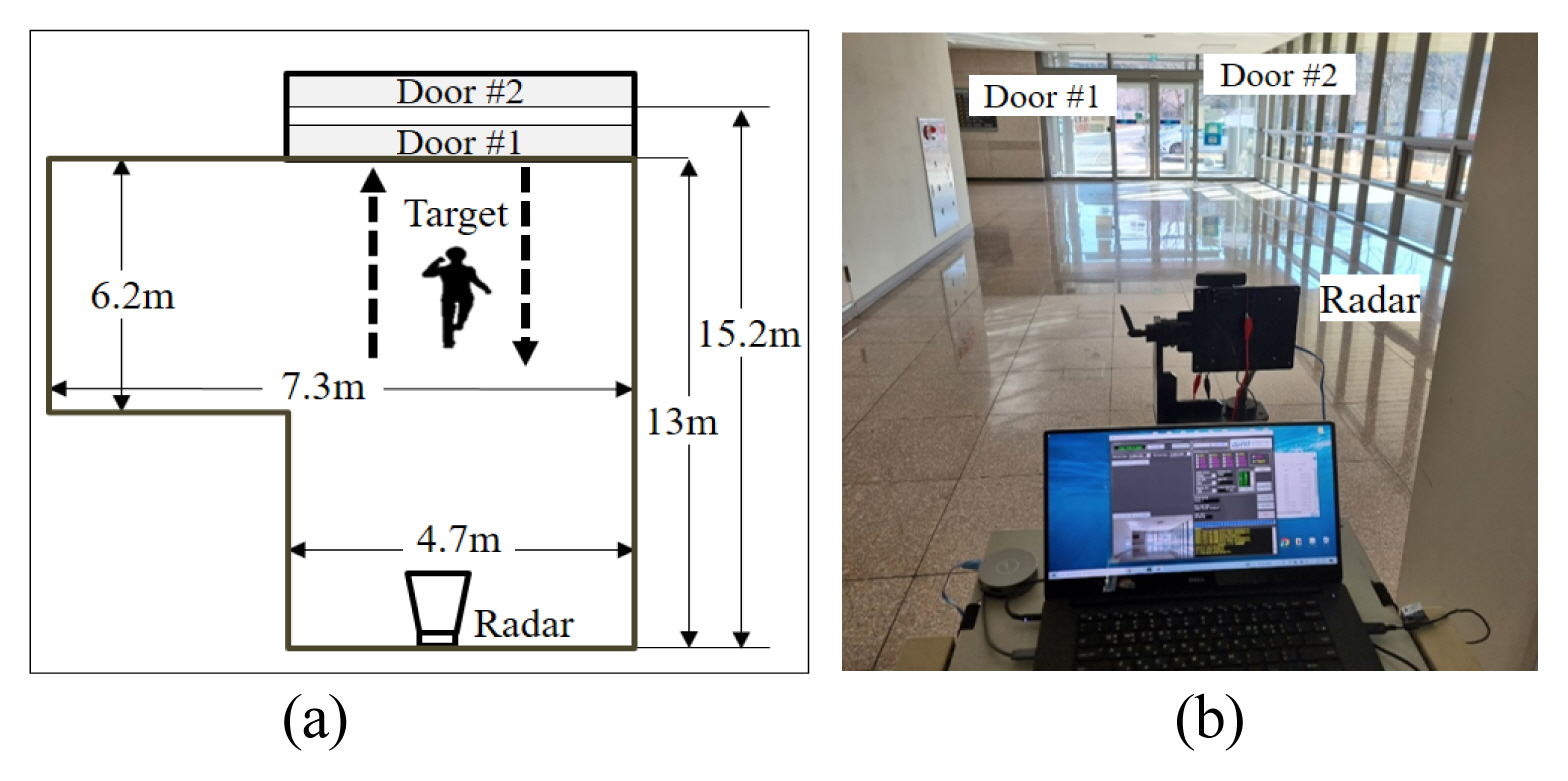
Fig. 3 shows the environment for the experiment, that is, the scenario and photograph of the experimental equipment. Two walls were there on the sides and two doors at the front that were cluttered, and their RCSs were significantly higher compared to that of the target person. The target started from the space on the left, exited through the door, and returned to the radar.
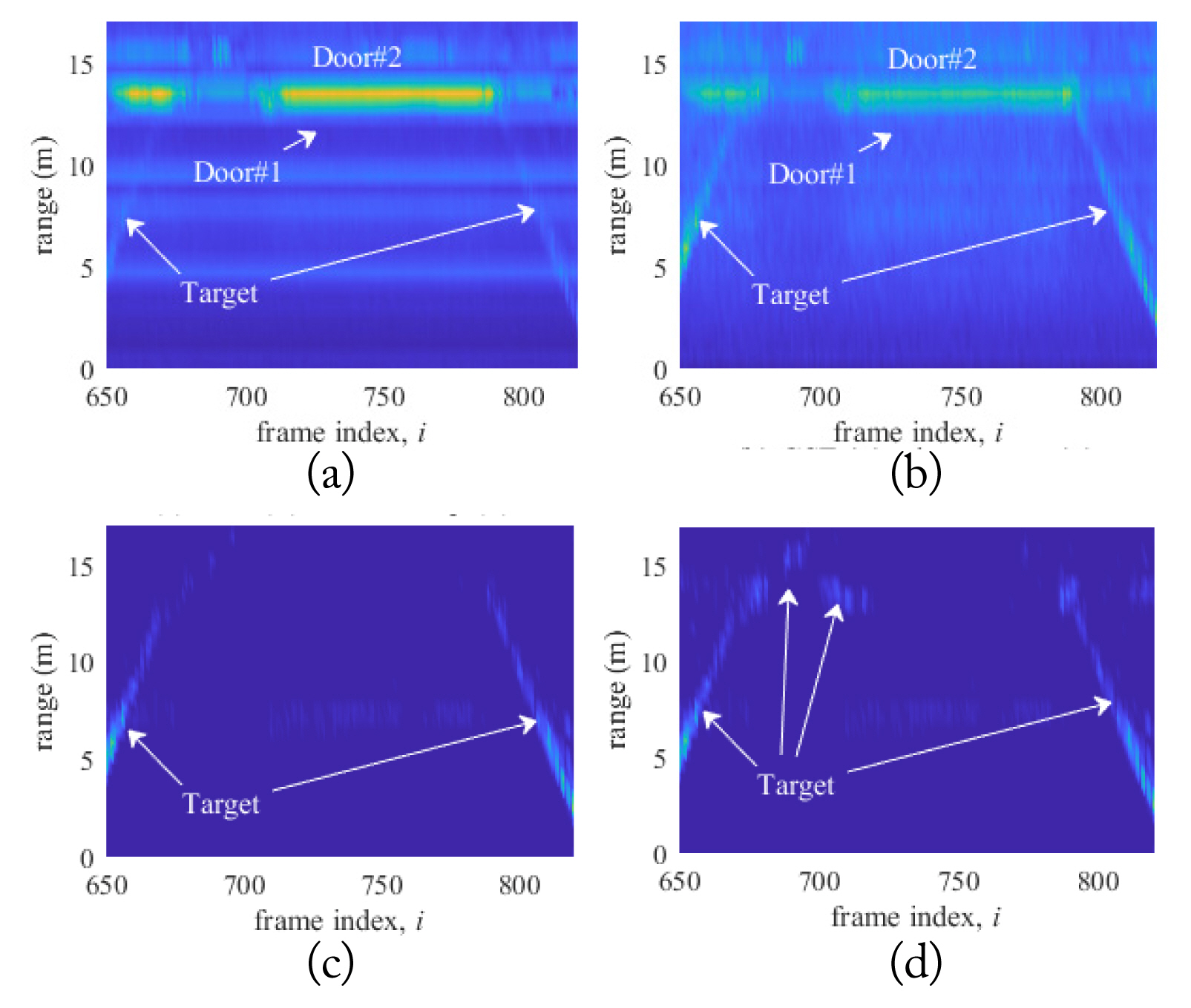
Fig. 4 shows the results of range measurement according to the frame index. The figure shows following four cases: cases using and not using the clutter suppression filter (CSF) and cases using and not using the clutter map. In Fig. 4(a), neither the CSF nor the clutter map was used. Because clutter was not removed, the doors with high RCS were dominant compared to the target, and the target was relatively insignificant. In Fig. 4(b), CSF was used but a clutter map was not used. Due to the effect of CSF, the intensity of the dominant doors in Fig. 4(a) became relatively small, and the intensity of the target, which was insignificant, became relatively large. However, it was difficult to detect the target around the door due to the door’s residual effects. In Fig. 4(c), CSF was not used but a clutter map was used (i.e., the case of the conventional algorithm). Due to the effects of the clutter map, almost entire clutter was removed, and the target results were clearly visible. However, it can be seen that clutter corresponding to large RCS doors was removed, and the target was also removed. Hence, the target was not detected around the doors. The target is detected up to about 13 m and remains undetected when the range exceeds 13 m. Fig. 4(d) shows the results of using both the CSF and clutter map, that is, the proposed algorithm. Since the effects of the dominant clutter were suppressed by CSF, the target was detected around the door after clutter removal using a clutter map. In other words, the target is detected when the proposed algorithm is applied, even in the range of over 13 m, which was not detected in Fig. 4(c).
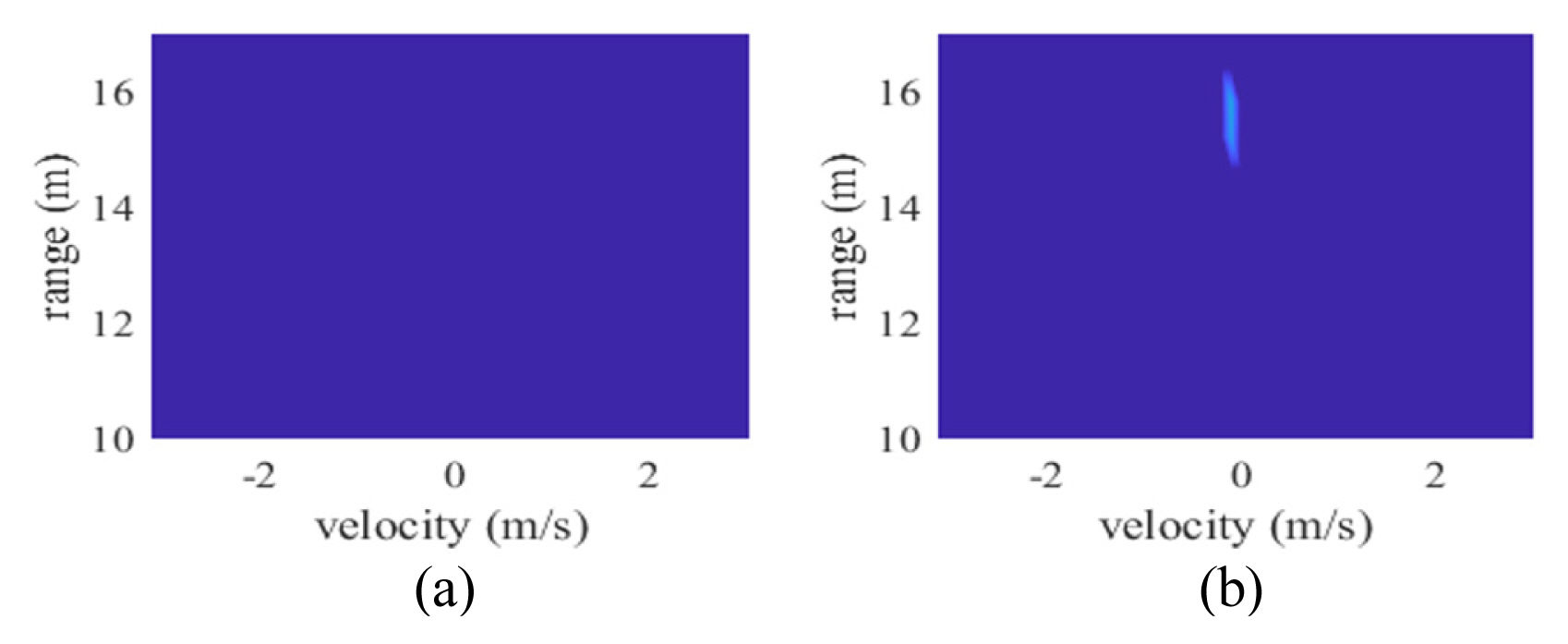
Fig. 5 shows a comparison between the conventional and proposed algorithms at i = 680 of RD maps obtained for doors with high RCS. In Fig. 5(a), not only clutter was removed but also the target, so the target remained undetected in the conventional algorithm, as expected from Fig. 4. In contrast, the proposed algorithm clearly detects the target around the doors in Fig. 5(b).
V. Conclusion
We proposed an efficient clutter cancellation algorithm based on a suppressed clutter map and CSF. The proposed algorithm significantly reduced the dominant clutter effect by applying a CSF between range profiling and Doppler profiling. As a result, the problem of targets remaining undetected around large RCS clutter was solved.